Volumetric Equine Scanner
Undergraduate research project with the department of Biomedical Engineering.
Design
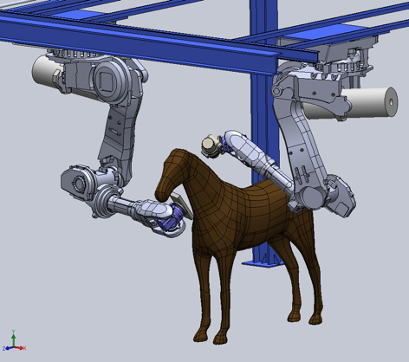
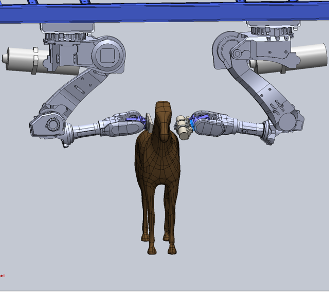
Designed the first volumetric equine scanner controlled by two ABB 6 DoF robotic arms. The concept was designed in SolidWorks and animated using Blender.
Mathematics
Developed the inverse kinematics used to control the robotic arms for scanning operations in MATLAB. The x-ray image shows the improved image quality compared to traditional CT scans.
Team Collaboration
Collaborated with surgeons from large animal hospital; held design reviews with MAE professors; worked with neurosurgeons on the implementation of a virtual image guided mechanical and computer system.